毫米波感知
毫米波简介
- 应用场景
- 自动驾驶(汽车雷达:障碍物检测、测速)
- 工业控制(震动检测、水位检测)
- 智能家居(手势检测、摔倒检测)
- 功能上
- 波长短,空间分辨率高
- 具有一定穿透性
- 物理实现:天线小、体积小、集成度高
- 劣势
- 易衰减,感知距离受限
- 绕射能力弱
FMCW 毫米波雷达
Frequency-Modulated Continuous-Wave 调频连续波,又称 Chirp 信号(“啁啾信号”),其信号的频率随时间呈线性变化。
其频率变化的图像如下图所示:
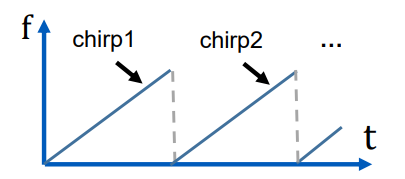
其频率的数学表达式为
拍频信号
FMCW 毫米波雷达的可以通过对接收信号和发送信号的处理,获得拍频信号,进一步获取物体的距离、速度等信息。其流程如下图所示:
flowchart LR 接收信号 --> HPQ((混频器)) --> 低通滤波器 --> ADC --> 拍频信号 发送信号 --> HPQ
- 混频器的作用是将接收信号
和 相乘,变为 输出 - 低通滤波器将会过滤掉
的信号,仅保留 部分
获取拍频信号的数学原理如下所示:
故拍频信号可表达为
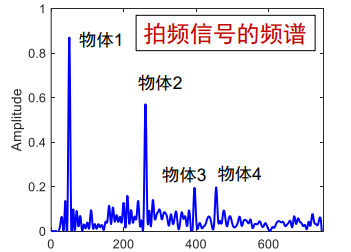
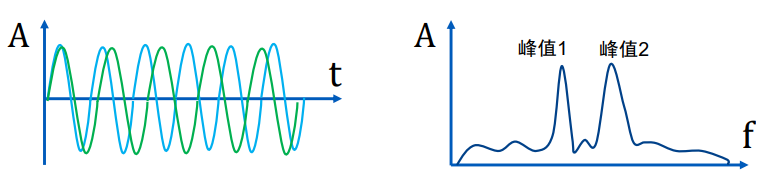
某物体的距离可通过拍频信号的频率获得
当存在多个物体时,拍频信号的频谱将出现多个峰值,分别代表不同的物体。
物体运动的速度可以通过计算 相邻 Chirp 信号 所对应的拍频信号的 相位变化 得到
拍频信号数字处理
在通过 ADC 将模拟信号经过采样转为数字信号后,需要进行进一步的处理。
flowchart LR ADC --> 拍频信号 --> R(Range FFT) 拍频信号 --> D(Doppler FFT) 拍频信号 --> A(Angle FFT)
每个拍频信号都是由若干 采样点 构成的,每个周期的拍频信号也对应着一个 采样序列。在采样若干周期后,就可以获得下方矩阵形式的数据用于后续处理。
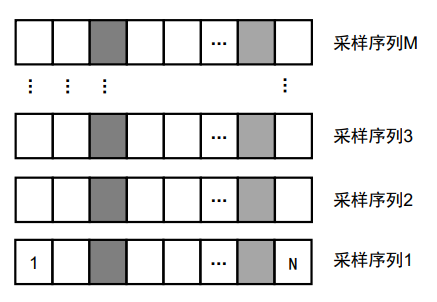
- 共 M 段采样序列,每段共有 N 个采样点,构成
大小的矩阵
对每段采样序列上的 N 个采样点进行傅里叶变换,得到不同的频率成分,每一种频率都对应一种 距离。同时距离可以被还原到采样点中,因为相同距离对应的采样点也相同。
对相同距离的物体进行速度分析:对列进行傅里叶变换,得到不同的频率成分,每一种频率都对应一种 速度。
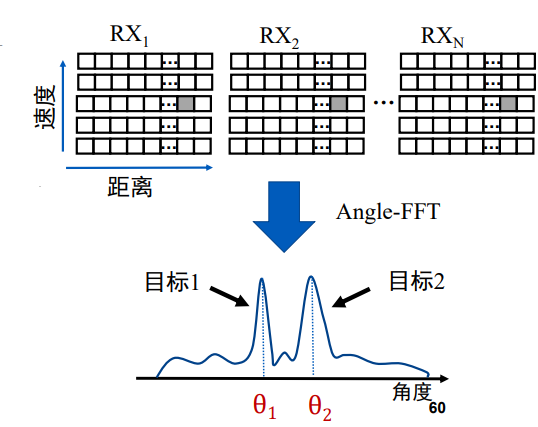
Rangle FFT 和 Doppler FFT 合称为 2D-FFT,但其无法区分相同距离且速度相近的多个目标,故引入方位角,通过 Angle FFT 辨别。
波达角:回波与雷达天线平面的夹角
波达角可通过设置多个天线,求取不同天线的 2D-FFT 结果相应位置的相位差,根据波达角计算公式,获取物体的角度。波达角计算公式如下图所示;
其中,
- 波达角分辨率
- 雷达的角分辨率和目标的波达角
有关 - 雷达的接收天线数目越多,角分辨率越精细
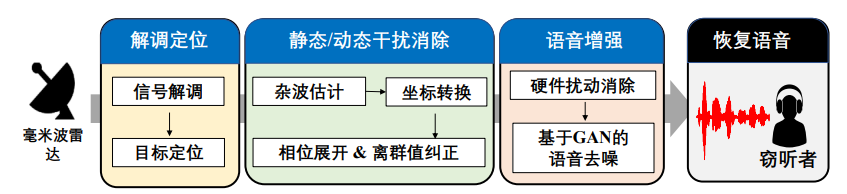
基于毫米波的语音侧信道窃取
主要介绍了两个科研结果,分别为 Wavesdropper 和 mmEve
- 原理
- 毫米波可以穿透常用的声学防护材料
- 毫米波短波长可以捕捉到人讲话时声带振动的细粒度信息

- 原理
- 手机听筒在播放音频时,会在手机外壳产生微小振动
- 该振动与所播放音频具有强相关性(振动耦合),可被毫米波设备捕获
- 步骤
- 数字化拍频信号
- Range-FFT
- 逐点提取相位
- 相位展开
- 幅值归一化
- 手机外壳振动波形